

产品中心
我们很乐意为您提供服务!
 133 3183 5800
133 3183 5800
135 0190 3641
 sxd@weimijy.cn
sxd@weimijy.cn
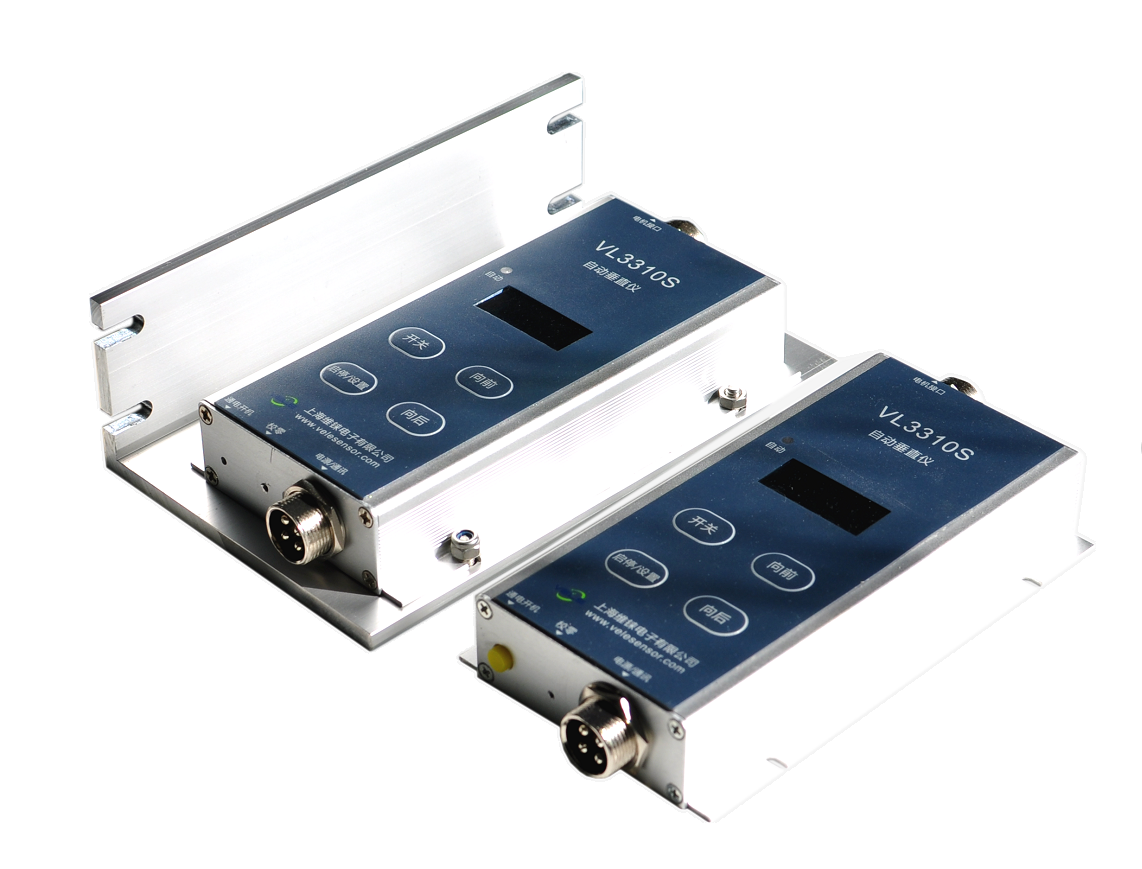
VL3310S自动垂直仪
产品特征
◇ 12~27VDC宽电压供电
◇ 50A (1200W max) 大电流驱动
◇ 电源极性和过压保护功能
◇ 正装、侧装和水平安装三种安装方式可选
◇ 可编程电机软启动保护功能
◇ 可编程滤波和电机调速功能
◇ 引线全部采用接插件
◇ 超高亮显示屏
产品应用
★ 精密水平调节 ★ 精密垂直调节 ★ 房车调平 ★ 高空作业车调平 ★ 高精度过程控制
产品性能参数
参数名称 | 最小值 | 典型值 | 最大值 | 单位 | 备注 |
测量轴向 | 单轴 | ||||
测量范围 | ±10 | ° | |||
重复精度 | ±0.005 | ±0.01 | ° | 门架垂直误差0.5mm以内 | |
分辨率 | 0.01 | ° | |||
零点偏置 | ±0.02 | ±0.05 | ° | ||
非线性 | 1 | 2 | %FS | ||
数据更新率 | 10 | Hz | |||
响应时间 | 0.02 | s | |||
外形尺寸 | 138*78*24 | mm | |||
重量 | 约180g | ||||
注:角度与距离误差的换算关系
假设粉墙机的高度为3米(3000mm),假设显示屏显示的数字为0.02,
则误差为0.017453*0.02*3000=1.047mm,单位为mm。其中,0.017453为常数。
因此,显示值与实际垂直误差对应关系的公式为(单位均换算为mm):
垂直误差 = 0.017453 * 显示值 * 粉墙机高度
电气、环境参数
参数名称 | 最小值 | 典型值 | 最大值 | 单位 | 备注 |
供电电压 | 12 | 24 | 27 | VDC | 内置30VDC过压保护 |
消耗电流 | 20 | 30 | 40 | mA | 空载电流 |
工作温度 | -40~85℃ | ||||
储存温度 | -55~105℃ | ||||
振动 | 50g, 0.15msec, 1/2 sine | ||||
冲击 | 100g@11ms | X、Y、Z每轴向各3次 | |||
电气连接示意图

注:虚线框内为按键扩展板部分,该部分需要用户选配,选配时不含三个按键及线缆。

参数设置说明

姿态定义

按键功能说明
Ø“自动”指示灯——点亮表示垂直仪处于自动调节状态,熄灭表示垂直仪处于待机状态(垂直仪无论如何倾斜,电动推杆均不动作)。
Ø开关键——当通电开机键处于弹出状态时,通过本按键实现垂直仪的开机(短按)和关机(长按3秒)。当通电开机键处于缩进状态时,垂直仪在接通电源时开机,断开电源时关机,此时禁止使用开关键。
Ø向前键——在正常模式下,如果设置参数中的“手动参数”值小于3,按住该键可使垂直仪前倾,松开即停止。在参数设置模式下,按动该键可使当前的设置位(闪烁位)加1。
Ø向后键——在正常模式下,如果设置参数中的“手动参数”值小于3,按住该键可使垂直仪后倾,松开即停止。如果设置参数中的“手动参数”值在3~9之间,按动一次该键,垂直仪将持续后倾3~9秒,在参数设置模式下,按动该键可使当前的设置位(闪烁位)减1。
Ø启停/设置键——短按本按键可启动或停止自动调节功能,在参数设置模式下短按本按键可使当前的设置位右移一位。长按本按键3秒钟将进入或退出设置模式。
Ø通电开机键——该按键为自锁开关,按下时,垂直仪通电立即开机,断电关机。弹出时,垂直仪通电处于关机状态,用户短按一次开机键,垂直仪开机,长按3秒开机键,垂直仪进入关机状态。
Ø校零键——按动一次该键,垂直仪将当前位置作为0点(垂直位置),并保存在内部存储器中。注意该按键位于垂直仪内部,按动时需要用细铁丝向内轻插,插入深度不会超过5mm。
注:垂直仪处于自动调节状态时(“自动”指示灯点亮),按动“向前”或者“向后”键的任意一个键,垂直仪将退出自动调节状态,同时指示灯熄灭。
安装方式

手动参数说明
参数 | 按“向前”“向后”键时动作 | 备注 |
0 | 垂直仪以1/4速度前倾或后倾(按键松开推杆即停止) | 适合初次安装手动调整校零 |
1 | 垂直仪以1/2速度前倾或后倾(按键松开推杆即停止) | 适合初次安装手动调整校零 |
2 | 垂直仪全速前倾或后倾(按键松开推杆即停止) | 适合手动复位推杆 |
3~9 | 只有“向后”键有效,按动一次,推杆全速后倾3~9s时间(松开按键后推杆仍运行) | 适合手动复位推杆 (推杆运行秒数与参数相同) |
推荐设置参数
1、推杆正装和反装时推荐设置参数
如果使用的推杆速度小于5mm/s,建议将电动推杆减速系数设置为7~9,传感器滤波系数设置到0~2之间。如果使用高速推杆,比如20mm/s,建议将电动推杆减速系数设置到2~4之间,传感器滤波系数设置到1~3之间。
2、推杆立装时推荐参数
本安装模式不适合使用高速推杆,一般选择推杆速度小于7mm/s,建议将电动推杆减速系数设置为1~3,传感器滤波系数设置到0~2之间。如果机器比较重,可适当增加电动推杆的减速系数。
总之,调整的原则是先确保推杆的推力足够,再调整传感器滤波系数使其匹配当前推力。应在推力满足的情况下传感器的滤波系数越小越好。
通讯协议(RS485 MODBUS-RTU)
1、串口参数:波特率115200(默认),n,8,1
2、设备ID=01(默认01,可设置ID范围1~8),数据寄存器如下表:
地址 | 0x00 | 0x01 | 0x02 | 0x03 |
数据 | X轴角度数据 | Y轴角度数据 | X轴参数闪烁位 | Y轴参数闪烁位 |
注:本垂直仪为单轴,因此只有X轴有效,用户只需要关心数据寄存器0x00和0x02,其余两个寄存器数据无意义。
所有寄存器的数据均为有符号的短整形数,高字节在前,低字节在后。
除读数据寄存器指令外,其余参数修改指令执行成功后返回原指令,失败则无返回。
3、读数据寄存器指令: 01 03 00 00 00 04 44 09,执行成功则返回当前垂直仪的角度值,失败则超时无返回。
4、垂直仪置零指令: 01 06 00 00 00 00 89 CA,本指令一般只在初次安装后校零时使用。
5、修改ID号指令: 01 1f 00 5A 00 05 74 18,将01号垂直仪的ID修改为05。
6、修改波特率指令: 01 20 00 5A 00 04 A1 DD ,将01号垂直仪波特率修改为38400(见波特率对应关系)。
7、按下设置键指令: 01 1E 00 00 02 57 E9 56,松开设置键指令: 01 1E 00 00 02 00 A8 A8。
8、按下向前键指令: 01 1E 00 00 00 47 E9 FA,松开向前键指令: 01 1E 00 00 00 00 A9 C8
9、按下向后键指令: 01 1E 00 00 01 4F E9 AC,松开向后键指令: 01 1E 00 00 01 00 A8 58
注:本垂直仪采用标准的MODBUS-RTU协议,更详细的协议信息请自行查询相关资料。
垂直仪返回角度数据的解算方法:
例如,某次的读数据指令返回如下结果: 01 03 08 00 23 00 00 00 00 00 00 87 15 ,则角度数据为0x0023(高字节在前,低字节在后)。将该值为角度值的1000倍,因此返回的角度数据除以1000得到的浮点数即是当前垂直仪的倾斜角度。例子中返回的角度值计算后为+0.035°。当角度数据大于0x7FFF时,表示角度为负,例如0xFF91,角度计算方法为(0xFFFF - 0xFF91 + 1)/1000 = -0.110°。为了显示数据稳定,用户在处理本数据时可以直接舍掉最后一位,只显示小数点后2位,即与显示屏显示一致。
闪烁位的数字范围为0~4,在正常工作模式下,该值为0x0000,进入设置模式后,该数据表示显示屏上哪一位正在闪烁,4表示最高位闪烁,1表示最低位闪烁。
如果在同一台设备上装两套垂直仪,一个调节纵向,另一个调节横向,并且垂直仪需要连接PLC的话,请将两个垂直仪ID号设置为不同的值即可,读取数据和参数设置的时候针对不通的ID发送即可控制两套垂直仪。
按键指令操作方法:
发送按键按下指令  收到返回
收到返回  延时(长/短)
延时(长/短) 发送按键松开指令
发送按键松开指令  收到返回
收到返回
波特率对应关系 | ||||||
代码 | 1 | 2 | 3 | 4 | 5 | 6 |
波特率 | 4800 | 9600 | 19200 | 38400 | 57600 | 115200 |
结构和尺寸

直角安装架示意图及结构图




